
By Andy Cruce, IAC 437169
A famous golf instructor once said that “practice makes permanent not perfect”. That is exactly the case in practicing aerobatic maneuvers. You do a loop, the ground goes around, you come out on altitude and heading but don’t really know how circular the loop was. Having a coach on the ground provides additional input to critique the maneuver but who has continuous access to a coach?
A way around this issue is to collect 6 DOF, inertial frame dynamics of the airplane during the maneuver and then display the results to the pilot immediately after the maneuver to determine the accuracy of the maneuver. Collecting the data in an inertial frame will distort the maneuver in the presence of wind exactly as a coach on the ground would have seen the maneuver. When the maneuver is shown on the tablet in the cockpit immediately after the maneuver the pilot can immediately determine how accurately the maneuver was performed. Was a loop circular or “L’ed”. How close was the dive angle in a Sharks tooth or Cuban to the required 45 degrees. Was the competition roll level with constant roll rate. After getting this kind of feedback immediately after the maneuver allows the pilot to try it again to correct the mistakes. As I said, it’s almost like having a coach in the cockpit. Later in the article there will be links to videos illustrating how this can be used by the pilot.
I have developed a device that does this. The key element in the device is shown in the figure below.
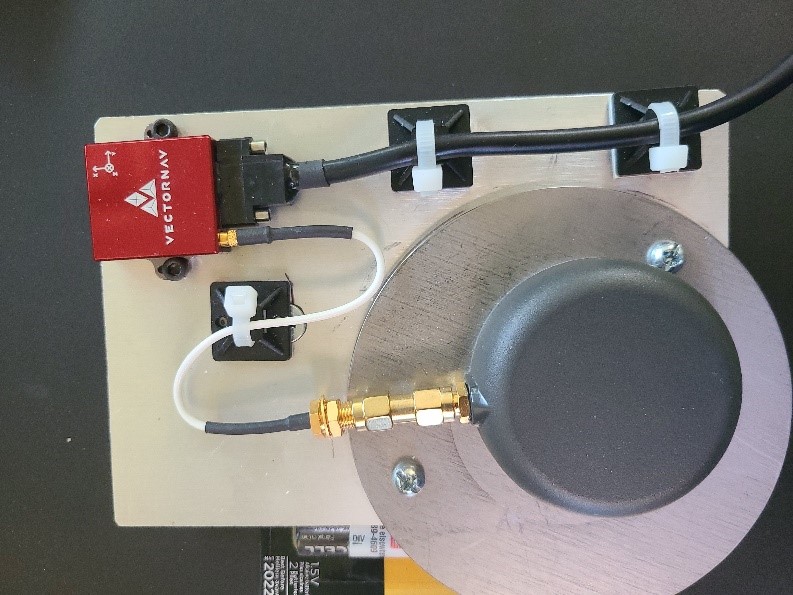 |
It is a Vector Nav VN-200 which provides the real time 6DOF, inertial information required to display the results of an aerobatic maneuver to the pilot. |
 |
The VN-200 is connected to the tablet The installation is shown here in the photo to the left. The operation of the system is simple. The system The VN-200 uses a dynamic alignment process. The |
Fig. 3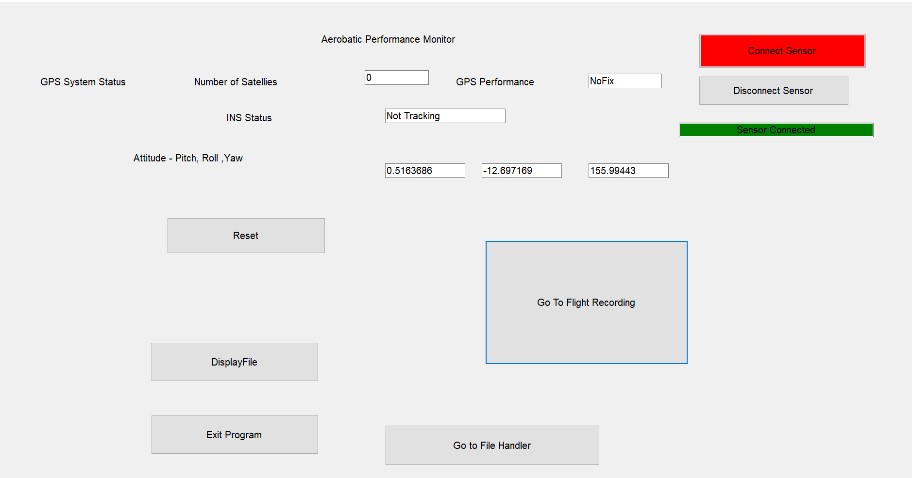 |
Fig. 4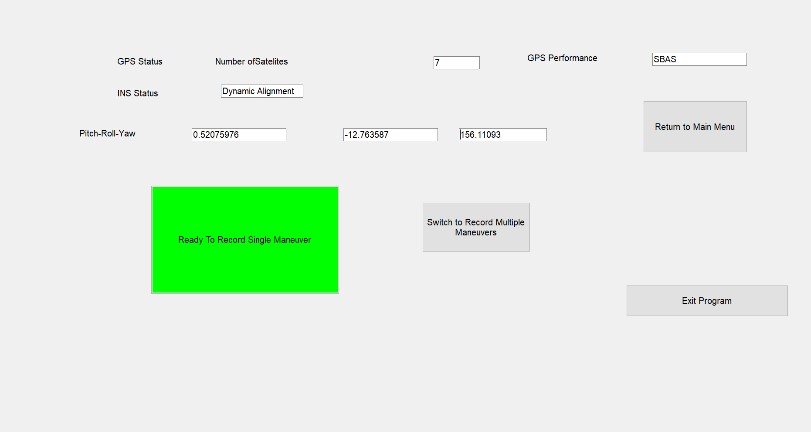 |
Fig. 5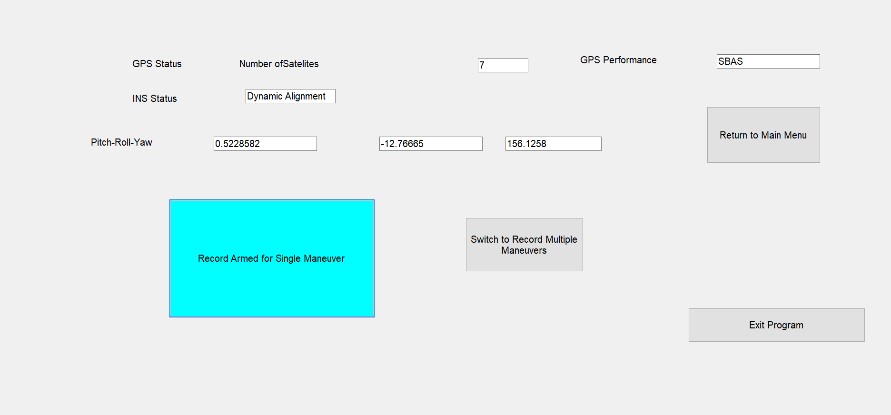 |
You are now ready to record a maneuver. Once set *Right click to open images in another tab for larger image. |
Once the system is “armed” the software waits until it senses a maneuver has begun based on a change in pitch or roll angle greater than the trigger values. The assumption is that the maneuver is entered from level flight. The system keeps the previous 3 sec of flight prior to the maneuver detection in a circular buffer. Once the maneuver is sensed the system start saving the 6 DOF motion. When level flight is sensed, the system waits for an “inter-maneuver” period, 3 seconds, to determine the maneuver is complete. The data for the maneuver are then stored in a CSV Excel file for display by the Unity program. This happens automatically, as soon as the maneuver is complete, and the Unity program is called to display the flight just recorded.
You can also set the system up to record multiple maneuvers. This is useful if you are executing part of a sequence. The system works the same as when you record a single maneuver but had a longer inter-maneuver period to account for time flying straight and level between maneuvers.
I can’t make a screen recording of what actually happens in flight, but I can show the process on the ground. In the video below, I’ll start up the system, go to the record screen, arm the system for record and then put in a pitch to simulate a maneuver then remove the pitch to terminate the maneuver. Once the maneuver the Unity Program will be called to display the pitch up and pitch down. I’ll discuss several of the camera control buttons on the unity screen. Then I will exit the unity screen and show how the maneuver can be saved for further review on the ground. The link for the video is:
https://app.screencast.com/YQaV6JBxqzqFf To access the video hold CTL down and click the left mouse button. (Turn up your speaker for sound.)The video shows how to operate the system but doesn’t give a very clear picture of how the system can be used in flight to assess maneuver accuracy or later on the ground to try to determine what is causing a maneuver to be incorrect. To demonstrate these, I’ll use some recorded maneuvers. What will be displayed is what the pilot would see at the end of a maneuver or in this case at home using a saved file. There will be two examples. The first is how I used the system to improve the accuracy of my loops. As part of this video I’ll show the structure of how the files are saved and how the system could be downloaded onto any Windows computer. The video link for this is: https://app.screencast.com/YXSTMLE9T9dqn
The second is a look at how am trying to improve my competition roll performance. I used the playback function in slow motion to determine where I was going wrong on a competition roll. The video link for this example is: https://app.screencast.com/50rhKxxvrGsJC
That is pretty much a complete description of how the system operates. I’m not planning on marketing the system but am willing to provide the executable files at no cost. The caveat is that I am not in a position to provide support for anyone using the system. The required hardware is not inexpensive, but what is when you are talking about airplanes. The major cost is the VN-200. It is available from VectorNav and costs about $3,000. After that things get considerably less expensive. I’ve used a Fusion 5, 10.5 inch tablet which only costs around $200. The only other expense is the RAM or other hardware used to mount the system on the airplane.
The concept for this device was mine and I wrote a significant portion of the software for the data collection system. However, I have been retired for 25 years and my software skills are considerably outdated. I had significant help from several members of the Codementor website. Sharat Achary located in Gandhinagr, Gujarat was essential in getting the Unity portion of the system operational. Humyun Shabbir located in Islamabad was very helpful in developing and debugging the WinForms code.
There are enhancements that could be added to the system but I’m not in a position to do them. One idea I have is to make the source code open source if someone is willing to take on the responsibility of configuration management. I’m not up on the latest mechanisms for collaborative software development, but I believe something like GitHub would provide a vehicle for managing future development in an open environment. If anyone is interested in taking on this responsibility, I would be happy to talk with them.
In the meantime, I’ll continue to use the system to try to improve my aerobatic performance. I hope you have enjoyed this article.
